宁波材料所在工业机器人动力学高效建模上取得进展
工业机器人线性参数化动力学建模对动力学参数辨识与机器人实时控制具有重要意义。传统的线性参数化模型在描述机器人动力学时,其回归矩阵中存在大量冗余多元多项式项,导致模型计算复杂度高,难以用于实时控制。
针对这一挑战,中国科学院宁波材料技术与工程研究所精密驱动与智能机器人技术团队提出了一种在编码幺半群中建立机器人动力学计算模型的新方法(图1),提升了线性参数化动力学模型的推导与计算效率。该方法首先证明了链式机构齐次变换矩阵中多项式与运动学参数的线性可分性,并据此推导线性多元多项式化的运动学模型;然后提取多项式的阶数和系数进行数值编码,并定义符合幺半群运算法则的乘法与克罗内克积运算来替代低效的符号运算,推导出线性多元多项式化的动力学模型;接着对得到的惯量参数矩阵进行分解,得到同时为线性参数化和线性多元多项式化形式的双线性化动力学模型;进而通过对双线性化动力学模型中的常系数矩阵进行秩分解,同步消除冗余多项式项和惯性参数。最终,使简化后的编码模型直接解码为Horner形式的符号动力学模型,减少模型多项式中的重复运算,为机器人控制算法的高效部署和计算奠定基础。在六种构型工业机器人(图2)上的实验验证表明,该方法在线性参数化模型推导和高效计算上具有显著优势(图3)。
相关成果以“Efficient Dynamics Modeling of Industrial Robots in Encoded Monoid Space”为题,发表在IEEE Transactions on Industrial Informatics(《IEEE工业信息学汇刊》)上(DOI:10.1109/TII.2025.3578138)。以上工作得到了国家自然科学基金(U20A20282, U22A20177, U23A20616)、浙江省自然科学基金重大项目(LD24E050010)、浙江省“领雁”攻关计划(2025G01018)和宁波市重大科技攻关项目(2023Z135)等项目的资助。
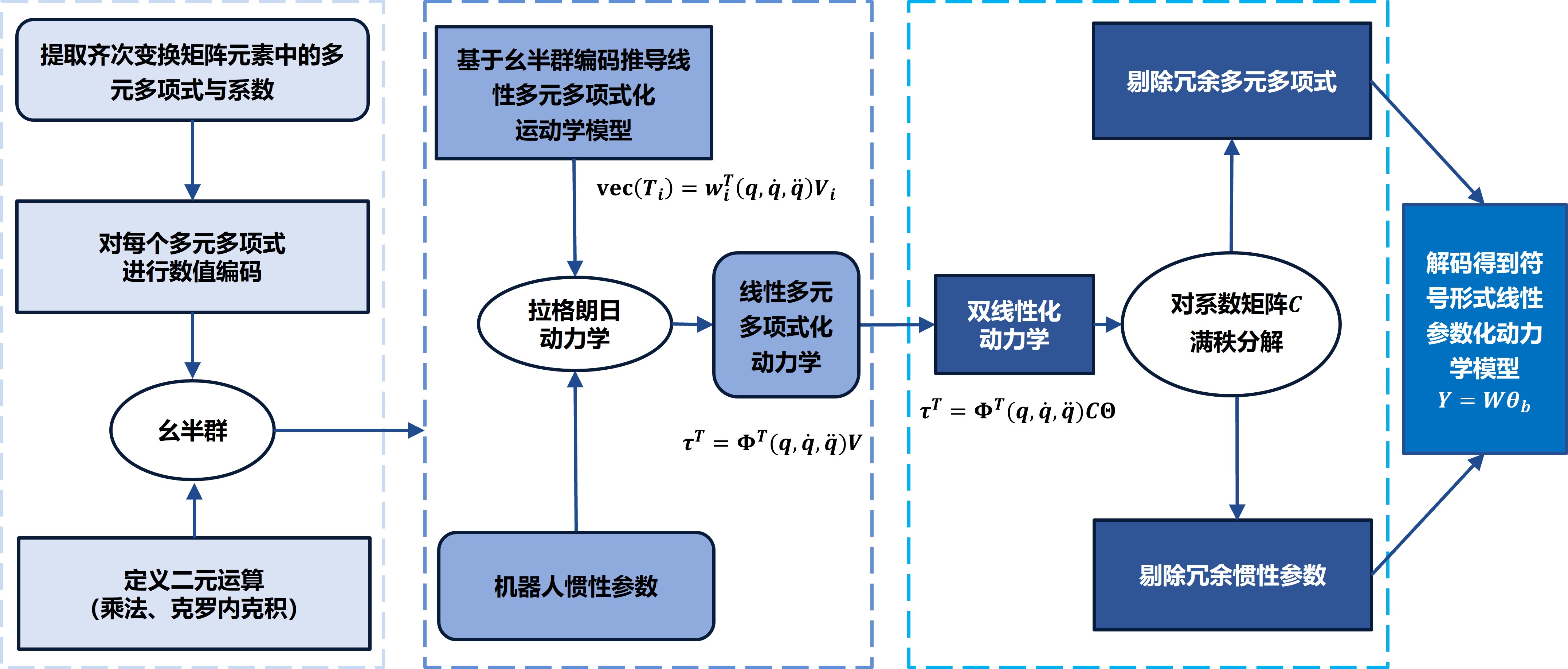
图1 提出的建模方法流程图
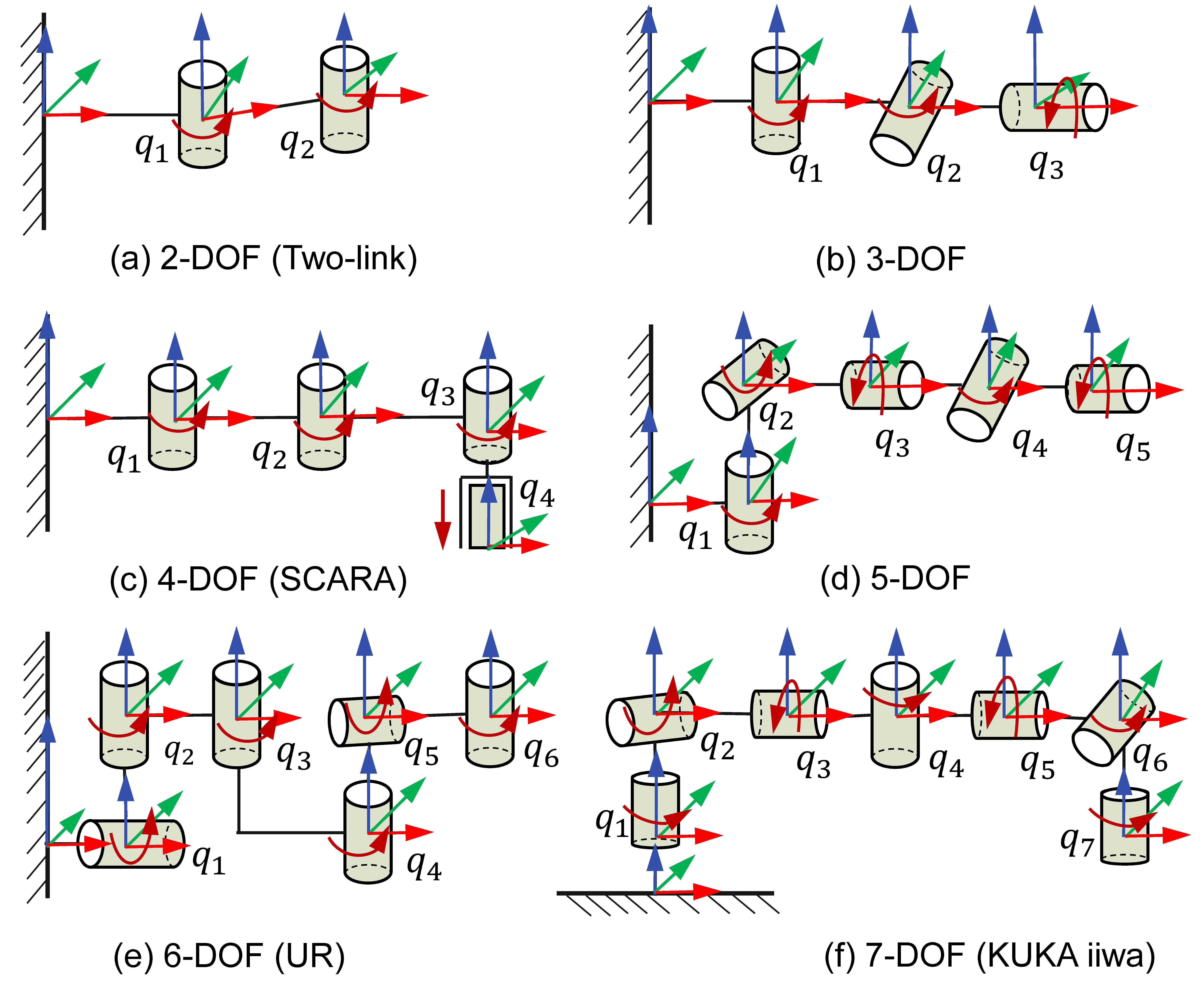
图2 六种工业机器人构型图
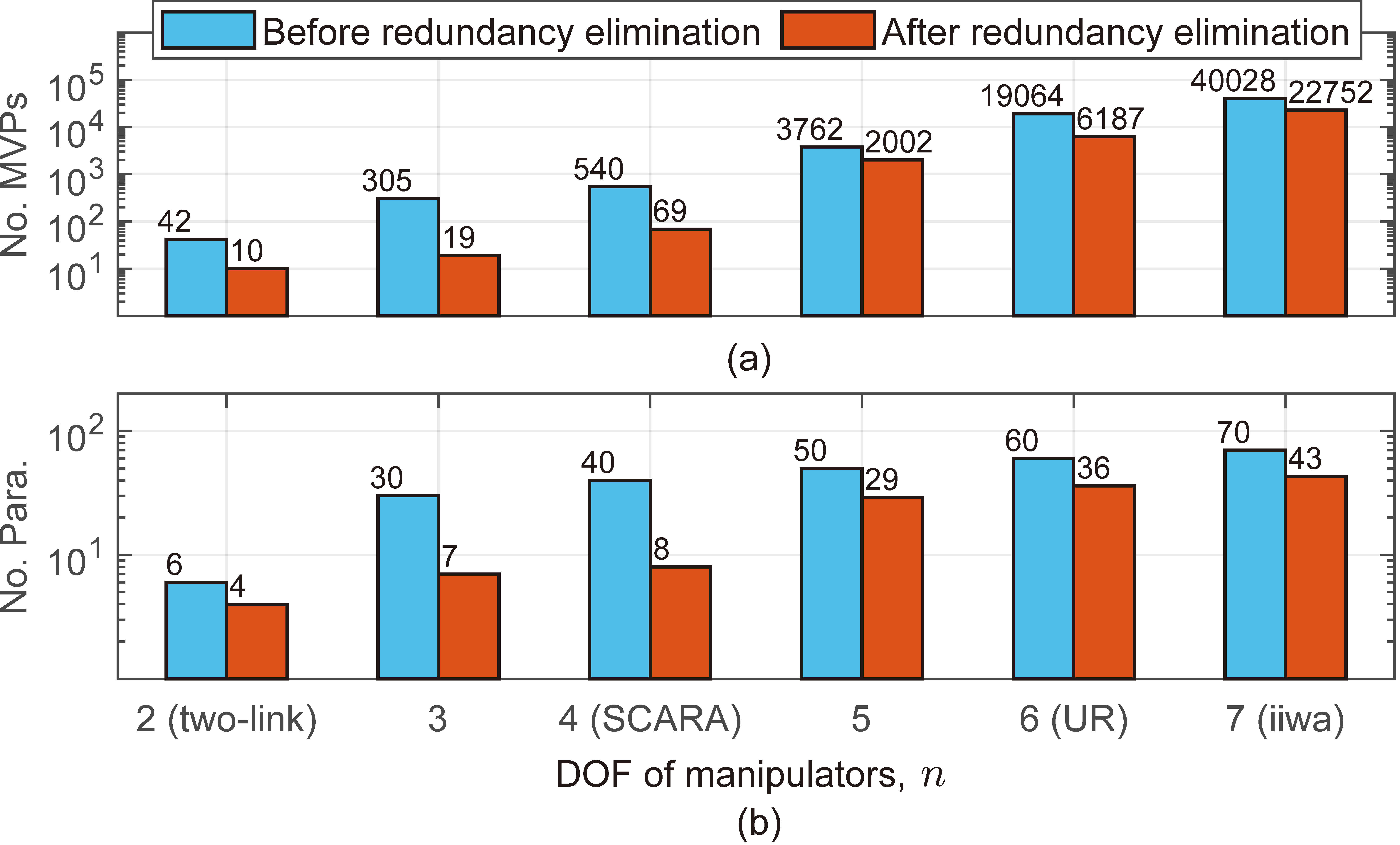
图3 动力学模型简化前后多元多项式和参数数量对比
(机器人与智能制造装备技术实验室)