宁波材料所研发的水下矢量推进器成功完成深海4500米级海试
近日,由中国科学院深海科学与工程研究所主持的中科院A类先导项专项研发的深海底多功能移动作业系统在我国南海进行了海上试验。中国科学院宁波材料技术与工程研究所精密驱动与智能机器人团队参与了该项目,并提供了2套水下矢量推进器,实现了深海底爬行式多功能移动作业平台的入水出水定向、海水中调姿和海底爬行辅助推进等多项功能,顺利完成预定的各项任务和考核指标。
深海底爬行式多功能移动作业系统设计最大工作水深4500米,可在深海底实现爬行作业,属于有缆深海作业装置。该装置由光电缆提供电源动力和长距离通信,然而在作业装置的下放和回收过程中易由于海流和浪涌影响而产生不可控的旋转,不仅有损坏光电缆的风险,而且可能导致作业装置无法回收等严重问题。因此需要调姿系统时刻保持作业装置的准确航向,避免其翻转、倾覆。
为保证深海底多功能作业系统在布放与回收时的姿态控制,宁波材料所精密驱动与智能机器人团队将推进和姿态调整功能集成到一个系统,研制了基于对转双转子电机的水下矢量推进器。该推进器使用永磁同步双转子电机直接驱动对转螺旋桨,可解决传统推进装置重量大、效率低、噪声大、易侧翻或侧滚等问题,提高了水下作业装置的平稳性;矢量调姿系统采用三自由度并联机构和直线驱动系统改变推进方向,可显著增强水下作业装置的调姿灵活性和机动性。
该团队成功研发了深海电动推杆、新型矢量调节机构、对转双转子直驱电机及基于碳化硅的高效率电机控制器等功能部件,攻克了深海环境下并联机构及推进器的耐压、防腐、密封等技术难题,完全实现了推进器的国产化。研制的矢量推进器额定功率3kW,额定输出推力800N,电机效率达到82%以上;推进器的矢量姿态调节角度最大达到±30°,通过调节左右2套推进器的推力,可实现水下作业装置的定向精度优于0.1°。与传统的单桨推进器相比,该矢量推进器具有效率高、推力大、可调姿、噪音低等优点,可广泛应用于水下潜航器、作业装置等的推进和调姿。
此次海试由探索二号试验船担任母船,宁波材料所精密驱动与智能机器人团队2名科研人员参航。水下矢量推进器搭载于深海底爬行式多功能作业系统,完成了一系列功能与性能验证测试,达到了4500米级深海装备标准,通过了现场海试专家组的考核,圆满完成了试验任务。

探索二号母船
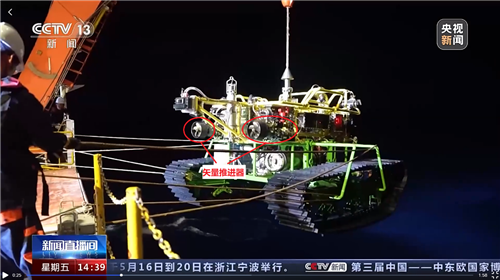
搭载于深海底多功能作业系统的矢量推进器
(先进制造所)